Deploying SICNav in the Field: Safe and Interactive Crowd Navigation using MPC and Bilevel Optimization
IEEE ICRA 2025 Workshop on Field Robotics
Sepehr Samavi, Garvish Bhutani, Florian Shkurti, Angela P. Schoellig
Abstract
Safe and efficient navigation in crowded environments remains a critical challenge for robots that provide a variety of service tasks such as food delivery or autonomous wheelchair mobility. Classical robot crowd navigation methods decouple human motion prediction from robot motion planning, which neglects the closed-loop interactions between humans and robots. This lack of a model for human reactions to the robot plan (e.g. moving out of the way) can cause the robot to get stuck. Our proposed Safe and Interactive Crowd Navigation (SICNav) method is a bilevel Model Predictive Control (MPC) framework that combines prediction and planning into one optimization problem, explicitly modeling interactions among agents. In this paper, we present a systems overview of the crowd navigation platform we use to deploy SICNav in previously unseen indoor and outdoor environments. We provide a preliminary analysis of the system's operation over the course of nearly 7 km of autonomous navigation over two hours in both indoor and outdoor environments.
Technologies
System Overview
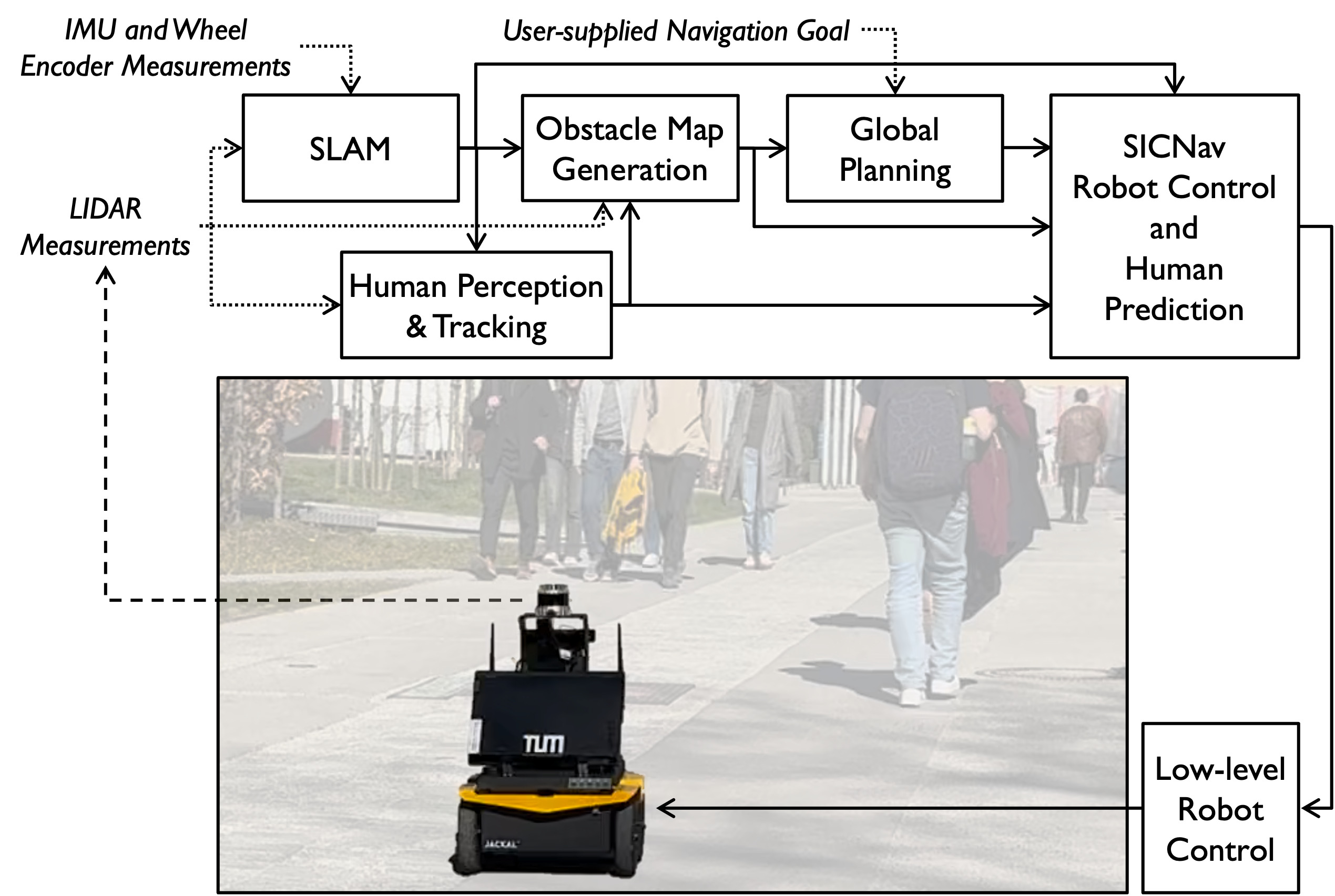
The autonomy stack integrates four core components on a Clearpath Jackal robot equipped with an Ouster OS1-128 LiDAR and an onboard computer running Ubuntu 20.04 and ROS 1 Noetic.
SLAM: 2D Google Cartographer processes LiDAR point clouds, IMU data, and wheel odometry to build and maintain a map of the environment. A novel 2D projection technique using the LiDAR's built-in IMU eliminates the need for a separate LiDAR-to-IMU calibration. Pose estimates are further filtered through an Extended Kalman Filter.
Human Detection & Tracking: YOLOv9 runs on the Ouster's intensity and reflectivity images — eliminating the need for a camera entirely. Detected contours are projected into 3D using the point cloud, and the aUToTrack method maintains consistent human identities across frames using Kalman Filters with a constant-acceleration motion model.
Global Planning: The ROS move_base framework generates a global occupancy map from LiDAR data, filtering out tracked humans so they are handled by SICNav rather than treated as static obstacles. A hybrid A* algorithm finds the global path.
SICNav Local Planner: SICNav replaces the default local planner in move_base. It solves a bilevel MPC problem that jointly optimizes the robot trajectory and predicts human motions via ORCA (Optimal Reciprocal Collision Avoidance), ensuring collision-free trajectories by construction. The MPC runs at 10 Hz with a 2-second prediction horizon.
Field Deployment
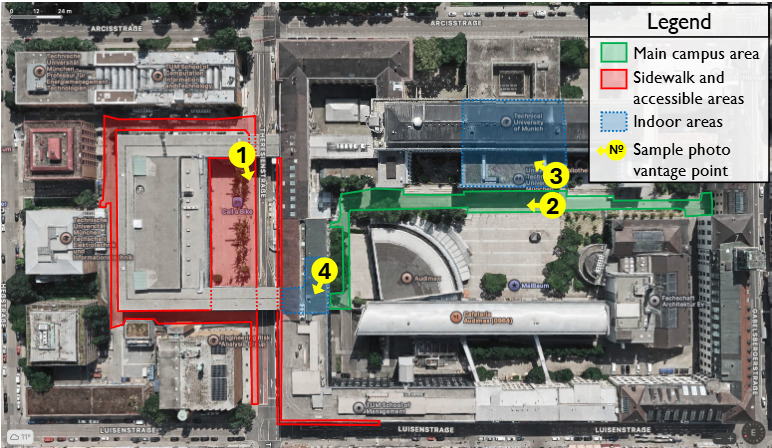
The robot was deployed at the Technical University of Munich campus in Maxvorstadt, Germany, across three distinct environments:
Main Campus Area: An outdoor pedestrian zone with cobblestones, asphalt, and pavement. Contains light poles, benches, bicycle parking, and parked cars.
Sidewalk & Accessible Areas: Sidewalks adjacent to university buildings and city roads, including moving cars nearby.
Indoor Areas: Narrow hallways, staircases, and open spaces within two university buildings with stone flooring.
The robot navigated autonomously for 1 hour and 51 minutes, traversing 6.73 km across all three environments. The sidewalk area had the highest manual takeover frequency (0.0121 s⁻¹), primarily due to the system's inability to detect downward steps — a limitation identified for future work. Indoor environments had the fewest takeovers (0.0019 s⁻¹).
Results
SICNav solve times remained well within the 0.25-second discretization period across all environments (indoor μ=0.102s, sidewalk μ=0.100s, campus μ=0.114s), confirming real-time feasibility even in crowded outdoor settings.
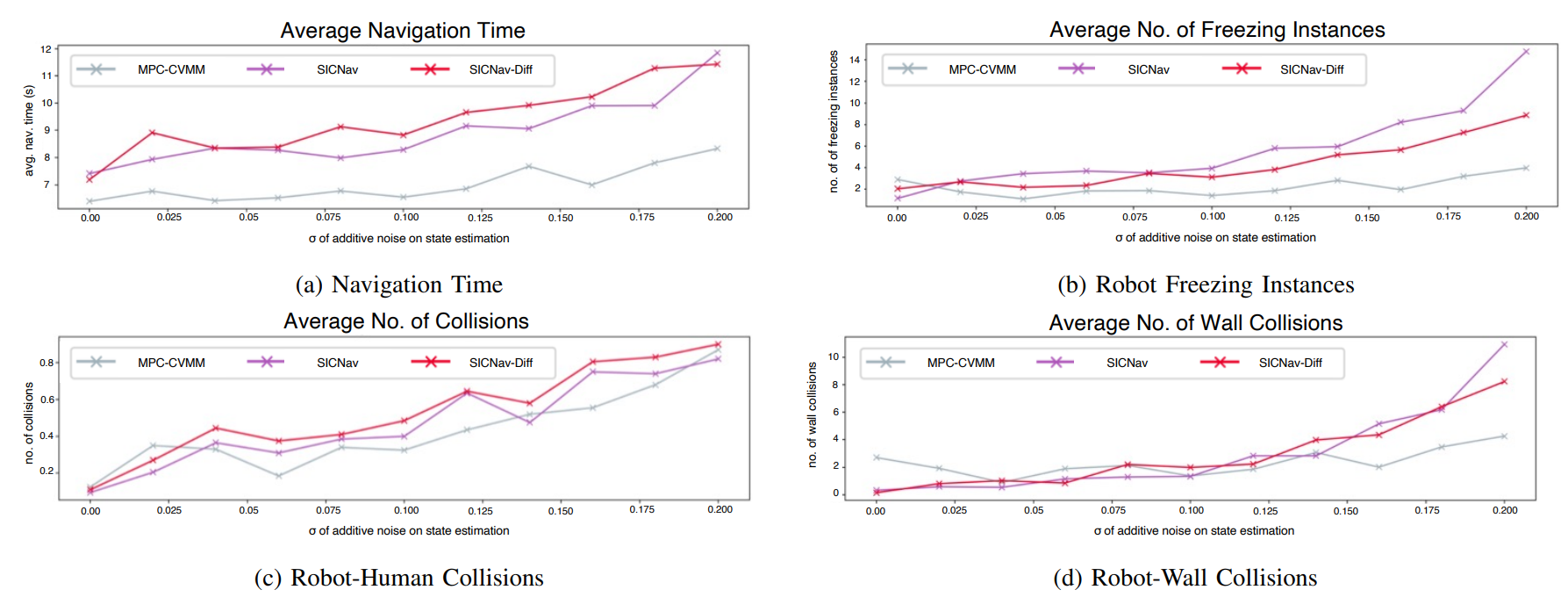
A simulation study evaluated robustness to localization and perception noise. SICNav was compared against SICNav-Diffusion (data-driven human intention prediction) and a non-interactive MPC baseline using Constant Velocity Motion Model (CVMM). Results showed that noise levels beyond σ=0.03 begin to narrow the performance gap between methods, motivating further study with per-component noise analysis in future work.
Videos
SICNav Field Deployment Overview
Overview of the SICNav system navigating autonomously in indoor and outdoor environments at TUM.